











 | |  | |
||
| KINGFISHER-W-3002 | KINGFISHER-W-1200W | KINGFISHER-S- 1000 | KINGFISHER-S- 1200W | ||
| 技术参数 | 技术原理 | AI 双目立体匹配算法 | AI 双目立体匹配算法 | AI 双目立体匹配算法 | AI 双目立体匹配算法 |
| 光源 | 环境光 | 环境光 | 环境光 | 环境光 | |
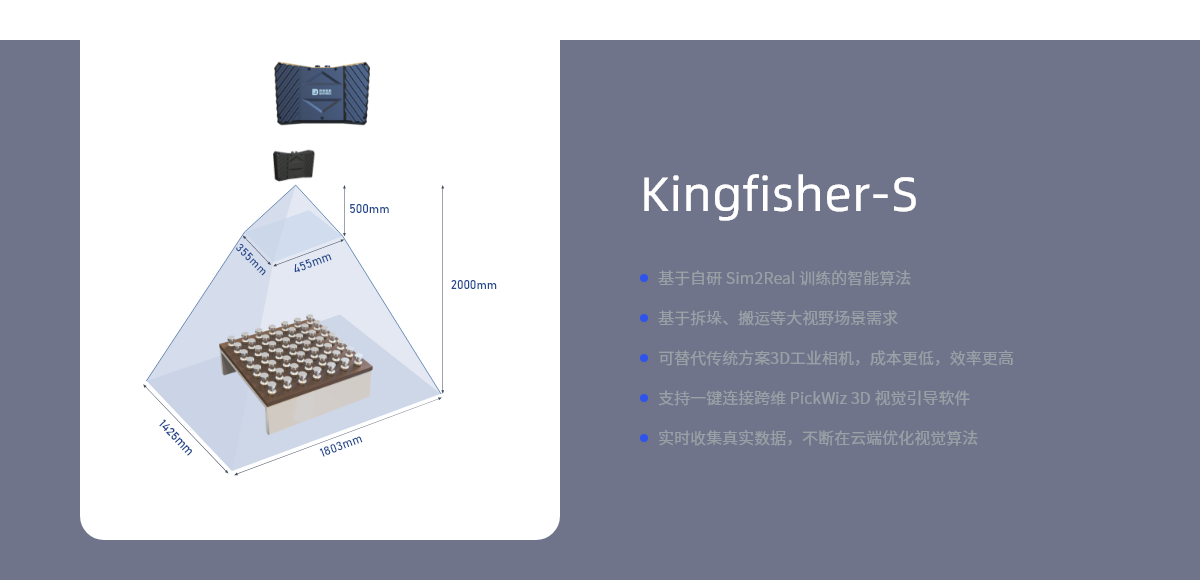
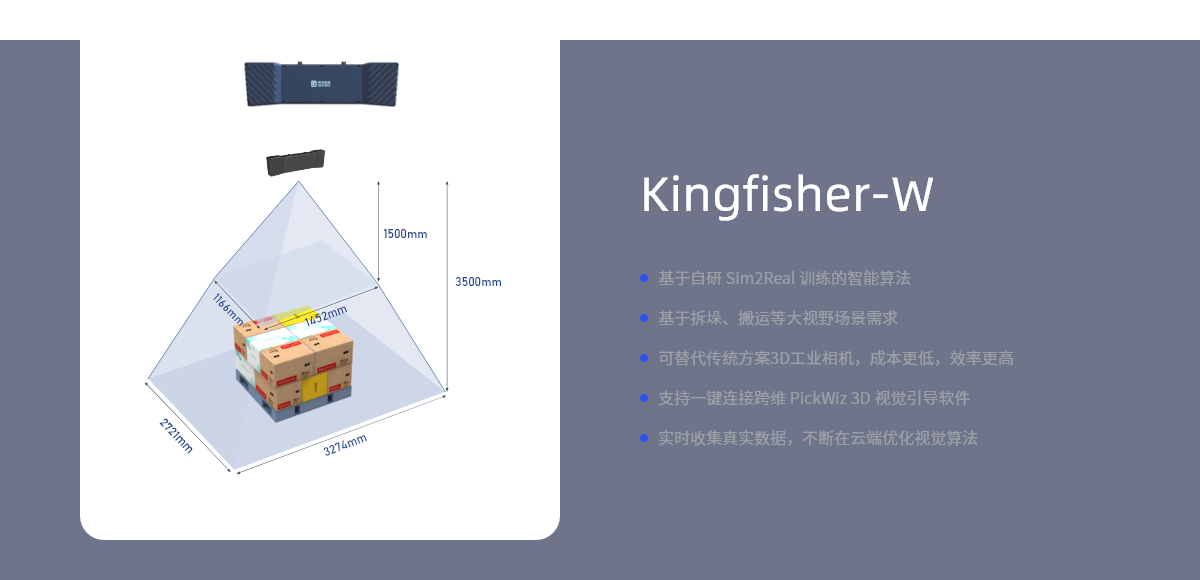
| 基线长度(mm) | 400 | 400 | 150 | 150 | |
| 重量(kg) | 1.5 | 1.5 | 1 | 1 | |
| 外形尺寸(mm) | 457*129*48 | 457*129*48 | 209*134*46 | 209*134*46 | |
| 工作温度(℃) | -20~40 | -20~40 | -20~40 | -20~40 | |
| 供电 | POE | POE | POE | POE | |
| 接口 | GigE | GigE | GigE | GigE | |
| 视场角 | 52°/44°(H/V) | 52°/44°(H/V) | 52°/44°(H/V) | 52°/44°(H/V) | |
| 分辨率 | 1280*1024 | 4024*3036 | 1280*1024 | 4024*3036 | |
| 测量性能 | 推荐工作距离(mm) | 1500-3500 | 1500-3500 | 500-2000 | 500-2000 |
| 近视场(mm) | 1452 * 1166 | 1774 * 1276 | 455 * 355 | 559 * 440 | |
| 远视场(mm) | 3274 * 2721 | 4012 * 2978 | 1803 * 1425 | 2283 * 1760 | |
| 重复精度(um) | 272 | 272 | 259 | 259 | |
| XY 轴精度 | 1.13mm@1.5m 2.56mm@3.5m | 0.42mm@1.5m 0.98mm@3.5m | 0.35mm@0.5m 1.39mm@2m | 0.14mm@0.5m 0.57mm@2m |
|
| 典型采集时间 | 1s | 1s | 1s | 1s | |
| 软件规格 | 操作系统 | Windows 11/Linux | Windows 11/Linux | Windows 11/Linux | Windows 11/Linux |
| 输出图像 | 彩色图像、深度图、点云图 | 彩色图像、深度图、点云图 | 彩色图像、深度图、点云图 | 彩色图像、深度图、点云图 | |







 |  |  |  |  |
||
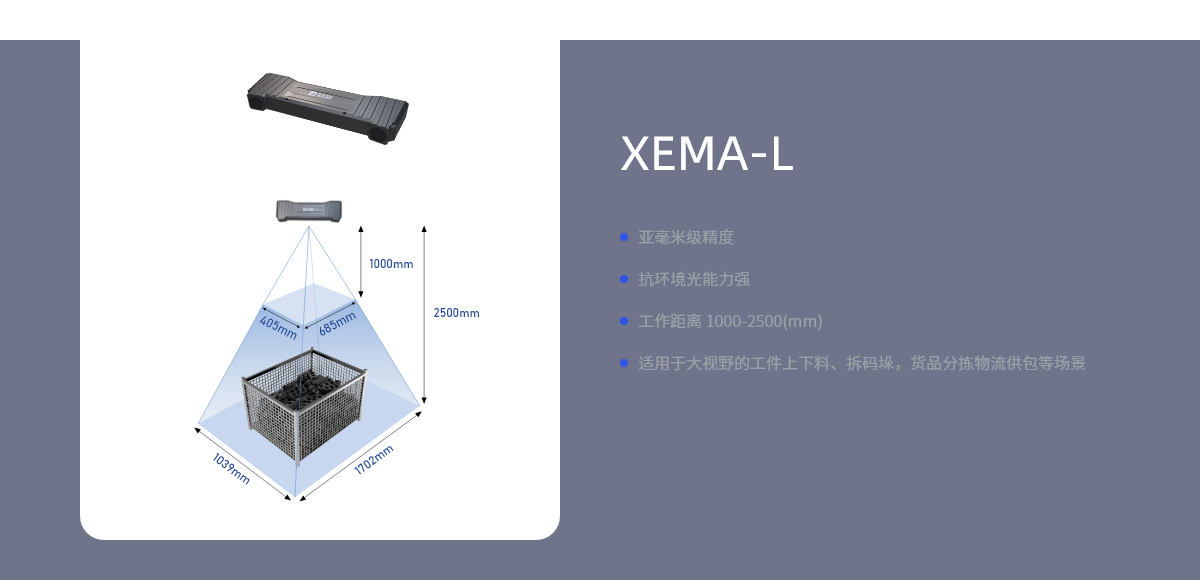
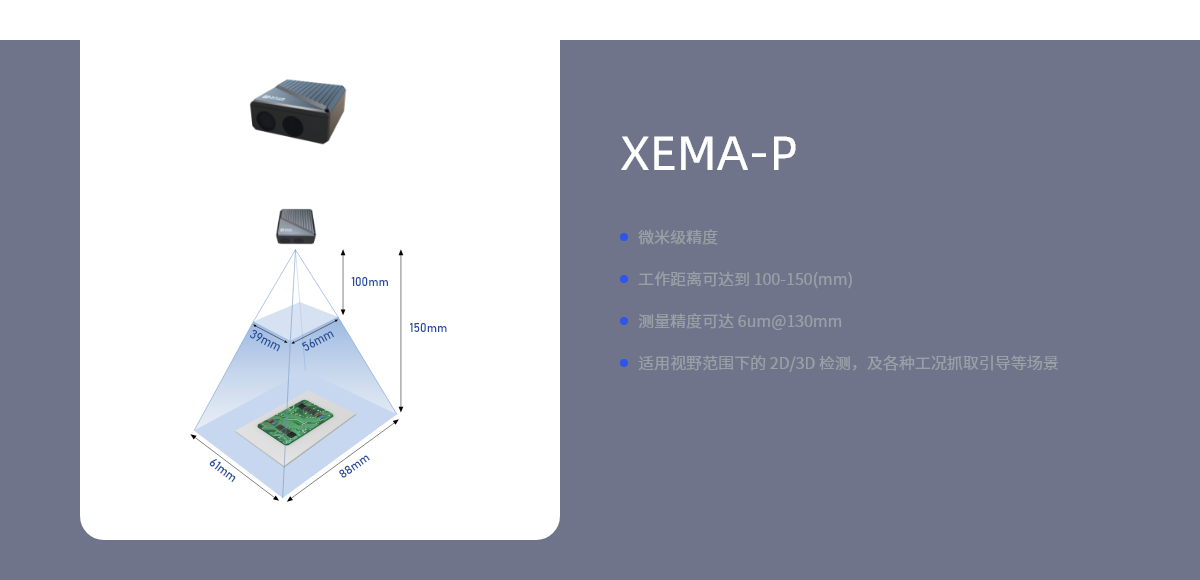
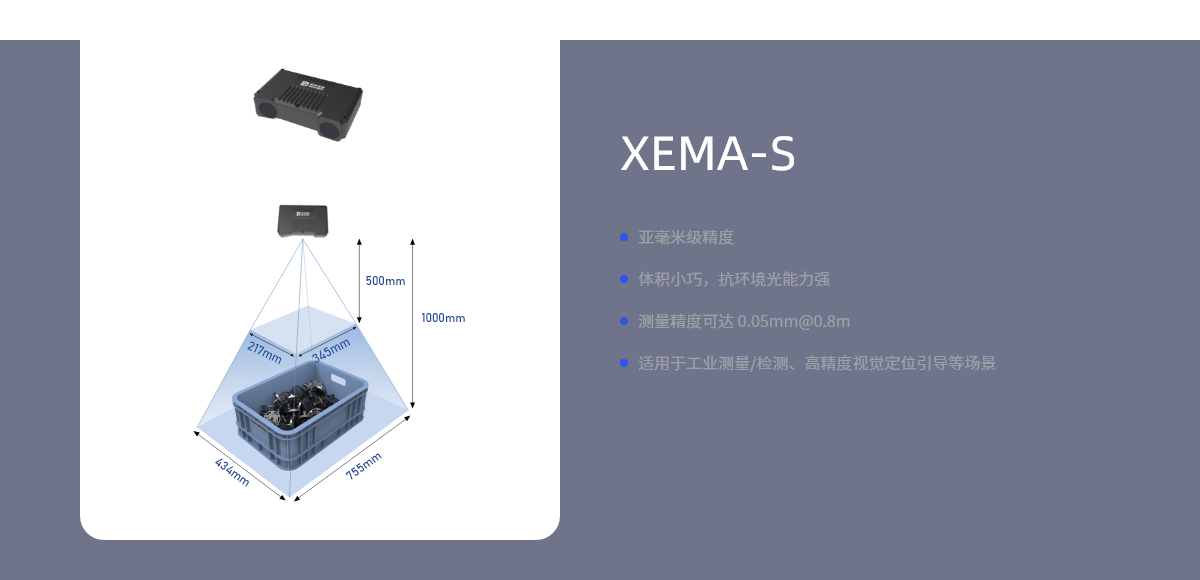
| FINCH W | XEMA L(C) | XEMA S(C) | XEMA P | XEMA D | ||
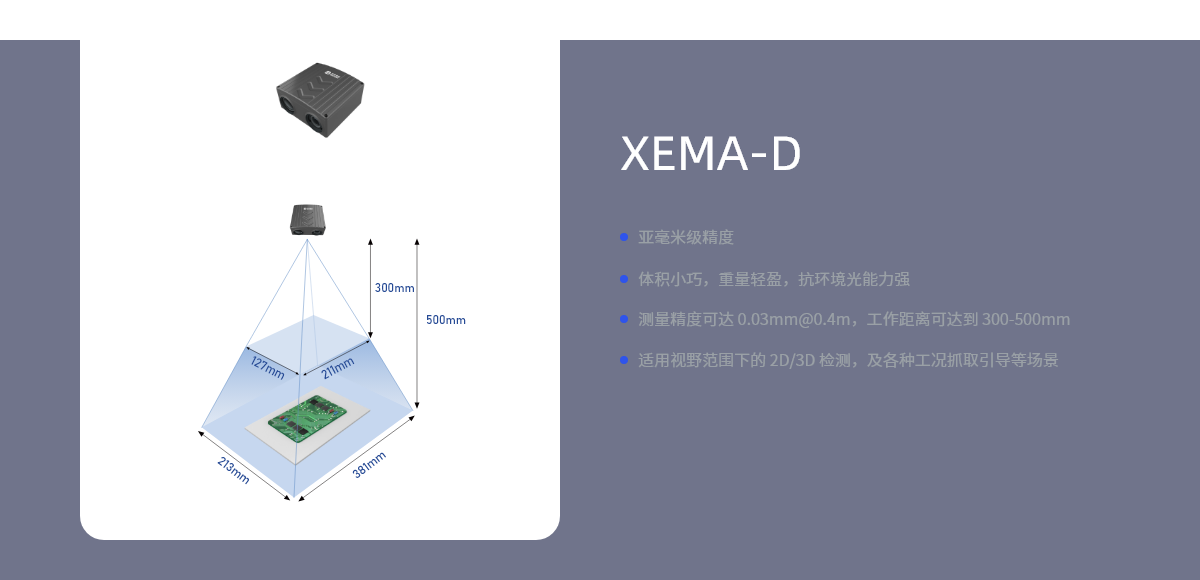
| 技术参数 | 近端视场(mm) | 1844×1332 | 685x405 | 345x217 | 56x39 | 211x127 |
| 远端视场(mm) | 3796×3109 | 1702x1039 | 755x434 | 88x61 | 381x213 | |
| 推荐工作距离(mm) | 1500-3500 | 1000-2500 | 500-1000 | 100-150 | 300-500 | |
| Z轴精度 | 0.25mm @2m | 0.5mm @2.5m | 0.05mm@0.7m | 6μm@130mm | 0.03mm@0.4m | |
| Z轴重复精度σ(μm) | 72μm @1.5-3.5m | 80μm @1-2.5m | 41μm @0.5-1m | 1μm @130-150mm | 21μm @0.3-0.5m | |
| 像素间距 | 0.8mm @ 2m 1mm @1.8m 1.7mm @3.5m | 0.36mm @1m 0.9mm @2.5m | 0.18mm @0.5m 0.4mm @1m | 30μm @150mm | 0.16mm @0.5m | |
| 典型采集时间 | 0.8-1.5s | 0.5-1.5s | 0.5-1.5s | 0.5-1.5s | 0.5-1.5s | |
| 输出数据 | 点云图、深度图、灰度图 (彩色图) | 点云图、深度图、 灰度图(RGB图) | 点云图、深度图、 灰度图(RGB图) | 点云图、深度图、 灰度 | 点云图、深度图、 灰度 |
|
| 操作系统支持 | Windows、Linux(Ubuntu 20.04) | Windows、Linux(Ubuntu 20.04) | Windows、Linux(Ubuntu 20.04) | Windows、Linux(Ubuntu 20.04) | Windows、Linux(Ubuntu 20.04) | |
| SDK接口 | C/C++/python | C/C++/python | C/C++/python | C/C++/python | C/C++/python | |
| 硬件参数 | 视场角(H/V) | 55°/45° | 38°/23° | 43°/23° | 35°/26° | 43°/23° |
| 外形尺寸(mm) | 465×140×73 | 433x133x51 | 207x127.5x50.5 | 126x146x61 | 126x120x60 | |
| 重量(kg) | 2.7 | 1.9 | 1.3 | 1.1 | 0.8 | |
| 基线长度(mm) | 400 | 350 | 145 | 70 | 80 | |
| 分辨率 | 黑白:1624x1240 彩色:1632x1232 | 1920x1200 | 1920x1200 | 2448x2048 | 1920x1200 | |
| 接口类型 | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | |
| 计算单元 | NVIDlA Jetson Nano | NVIDlA Jetson Nano | NVIDIA Jetson Nano | NVIDIA Jetson Nano | NVIDIA Jetson Nano | |
| 额定电压 | DC 24V, >=2A | DC 24V 3.2A | DC 24V 3.2A | DC 24V 3.2A | DC 24V 3.2A | |
| 工作温度 | -10~30°C | -20~50°C | -20~50°C | -20~50°C | -20~50°C | |
| 认证 | / | CE/FCC/RoHS | CE/FCC/RoHS | CE/FCC/RoHS | CE/FCC/RoHS | |





 |
|
| SPARROW | |
| 推荐工作距离(mm) | 300-500 |
| 近视场(mm) | 181*122 |
| 远视场(mm) | 300*209 |
| Z轴精度(mm) | 0.05 |
| 典型采集时间(s) | 0.4-1 |
| 输出数据 | 点云图、深度图、灰度图(RGB图) |
| 操作系统支持 | Operating system(CUDA>=11.0) |
| 操作系统 | C/C++/Python |
| 外形尺寸(mm) | 130*90*37 |
| 重量 (kg) | 0.46 |
| 基线长度(mm | 75 |
| 分辨率 | 1440*1080 |
| 接口类型 | GigE |
| 额定电压 | DC12V 5A |


