该系统基于 DexVerse™ 的 Sim2Real-3D 数字孪生和混合智能物理引擎及 3D 视觉-语言-动作(VLA)基础模型开发,使通用机器人具备感知目标物体和环境以及分解规划任务和引导机器人运动的能力,并为通用机器人提供人机自然交互界面。该系统针对工业自动化场景推出了 PickWiz 3D视觉引导抓取软件,可引导机器人执行一系列复杂的操作任务,实现具身智能在工业场景的规模化落地。
PickWiz 是跨维智能自研的基于具身智能核心技术,为工业视觉引导任务定制的全新一代3D视觉软件。适用于拆垛、无序抓取、有序上下料、单目标精准定位等多种工业自动化场景。通过零代码、零编程的设计,有效降低3D视觉引导抓取软件的学习门槛,大幅缩短交付周期。
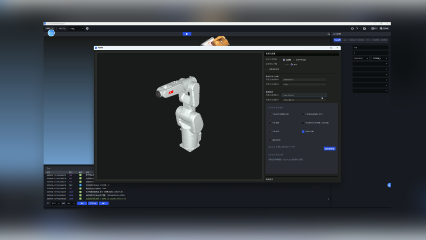
得益于 Sim2Real-3D数字孪生技术与混合智能物理引擎及3D VLA基础模型, PickWiz 能够高效识别任意几何形状的物体,如纸箱、麻袋、金属和塑料工件等等。与传统的基于规则的场景重建方法相比,无需为每种新物体或场景元素单独训练 3D 检测器。该系统可以直接利用 CAD 模型进行快速适应,可快速实现柔性换产。此外,PickWiz平台现已适配国内外数十家品牌机器人,并可快速适配新品牌机器人,从而支持生产线的快速和灵活变更,提高生产效率和适应性。
PickWiz 的内置通用 3D VLA基础模型使得机器人能够承受某项任务中不可预测的情况或环境中的不规则波动。通过物理模拟机器人运行环境,并结合现实世界的动态干扰或中断,DexVerse””能通过Sim2Real生成一个具有绝对精确标注的广泛数据集,以应对物体堆叠、一定程度反光、暗色等具有不同光线、障碍物和遮挡条件的环境。基于这种数据集训练的 3DVLA基础模型所赋予的识别、定位、测量等视觉功能,进一步增强了机器人的鲁棒性,保障其任务的安全执行。
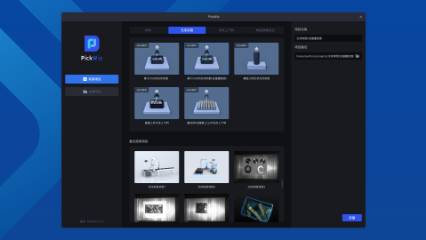
PickWiz 通过 DexVerse”实现了机器人的高精度灵活驱动,其预设了多种典型工业场景,整合了纸箱拆垛、单目标精定位、工件上下料、浅框无需抓取等应用插件。这些插件无需编程,用户仅需建立简单的设备连接、进行运行时设置和配置工作流程,便可快速启动生产作业。
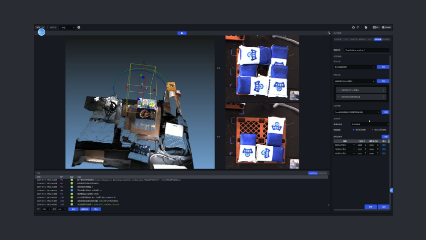
PickWiz的智能抓取算法保障了机器人运行过程的稳定性和安全性。在机器人进行抓取时,可自动选取合适的抓取角度和位置,避免碰撞,保证产线稳定生产。此外,软件支持工件多抓取点,抓取裕度和对称性设置,多 TCP等功能,配合运动仿真和碰撞检查,引导机器人在无碰撞的前提下准确抓取目示
生成式AI视觉算法能够处理复杂情景,展现优异的识别效果
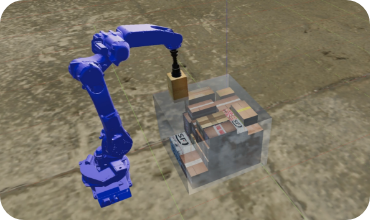
采用前沿具身智能技术,更好应对各类复杂场景
PickWiz 适用于半结构化的工业场景,与成熟机器人系统搭配使用,比如在工业机械臂和协作机械臂
RoPilot 机器人控制器系列支持通过自然指令和演示的人机交互,是 AI 使能的可以自主编排复杂任务的下一代机器人控制器。
产品研发中,敬请期待……