联想创投领投,通用具身智能技术公司「跨维智能」完成战略轮融资
近日,高通用性具身智能技术研发公司「跨维智能」完成由联想创投领投的战略轮融资,融资资金将主要用于产品研发、团队扩充和市场拓展等方面。
01 通用具身智能的发展与落地路径
具身智能学习需要海量的带标注数据,而真正实现具身智能的落地,更需要海量的高精度高质量和丰富标注类型的数据。不同于LLM/VLM等大模型的训练,训练具身智能大模型的数据是与物理智能体相关的,是在物理世界绝对坐标系下的精确测量数据,在数据获取难度、数据获取成本、标注周期等因素都会存在多重掣肘,极大影响具身智能落地的周期及成本。因而通过仿真获取合成数据成为了一个必然的选择。
02 跨维智能的进阶之路:自研仿真引擎、3D大模型、AnyGrasp
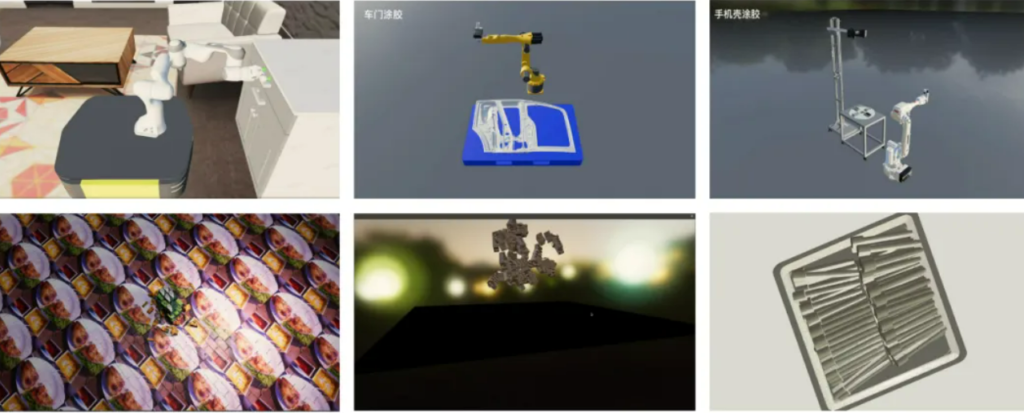
跨维智能创始人贾奎表示:Sim2Real是通过物理仿真机器人操作场景,并引入各种与任务相关的真实世界的干扰(视觉的、物理的、任务描述的干扰,环境distractors等),再通过渲染、轨迹数据记录、关节数据记录等方式形成海量的带绝对精确标准的合成数据,用这样的合成数据训练具身智能大模型。
跨维智能以Sim2Real为核心,持续打造底层技术核心能力。打造了独有的DexVerse™数据与具身智能仿真引擎,用于数据生成与大模型训练。该引擎基于概率建模的程序化生成仿真方案与生成式AI技术相结合,解决现有技术无法合成形式多样的高质量三维仿真数据资产、以及难以人为介入控制所导致生成不遵循现实物理约束的缺陷,实现高效零成本且更加真实可靠的仿真数据生成引擎,具备低成本获取海量丰富数字资产的能力,为持续低成本生成数据打造了坚实的数据资产基础。同时,结合在具身智能多模态大模型上的长期积累,跨维智能打造了基于3D VLA (3D Vision Language Action) 大模型的成像感知套件,从而逐阶段支撑各行业趋近实现AnyGrasp/AnyManipulation,而不是针对不同的操作对象进行定制的任务编程。
联想创投史晨星认为:跨维智能拥有最优秀的Sim2Real和大模型相关技术,是实现高通用性具身智能的核心底座。目前跨维智能依托Sim2Real和相关技术,在具身智能领域拥有深厚产品积累,已打造软硬一体产品矩阵,包含基于3D生成式AI的Sim2Real AI引擎、基于3D VLA大模型的成像感知套件,并且在具身智能领域商业化落地处于领先位置。
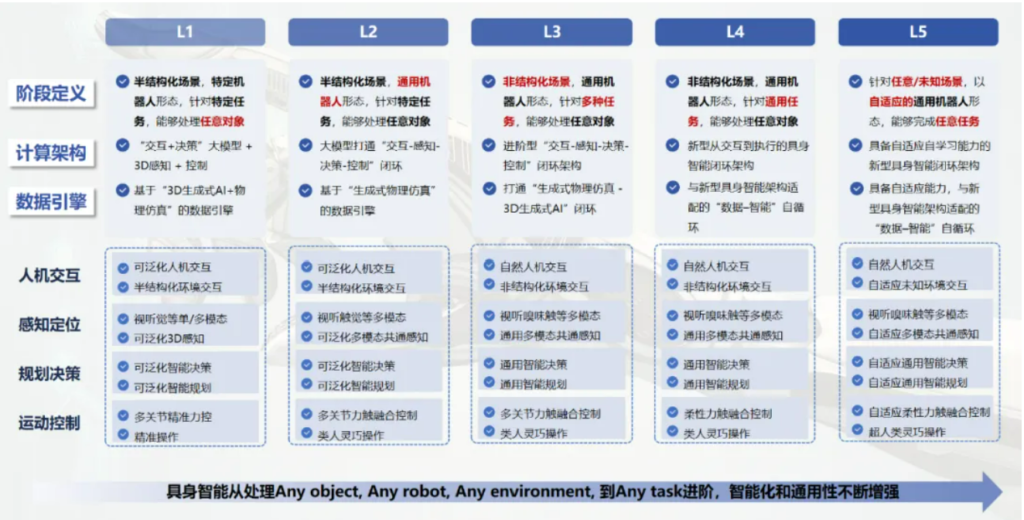
03 由半结构化启程,迈向全场景非结构化通用智能
如前所述,跨维智能优先将技术应用在大规模的半结构化场景:如工业制造领域。通过赋能较为成熟的机械臂/机器人,在半导体、汽车、光伏等行业均已有较好的落地应用,跨维方案对比传统技术能有效地节省大量部署时间,降低成本,提升稳定性及通用性,支撑柔性化生产。
跨维智能创始人贾奎透露:公司未来会根据通用性本身的技术发展轨迹,依次覆盖从半结构化到非结构化场景。如典型的工业/协作机械臂场景,逐步实现支撑(接近)任意物体与场景抓取/操作的具身智能成像、感知与控制系统、支撑在各类机器人上快速自动完成新任务部署的机器人控制器、能够自主完成单轮及多轮任务的自主机器人系统。以上实现后,也将开启通用/人形机器人在包括家庭在内的更广泛场景落地的可能性。


