项目优势:
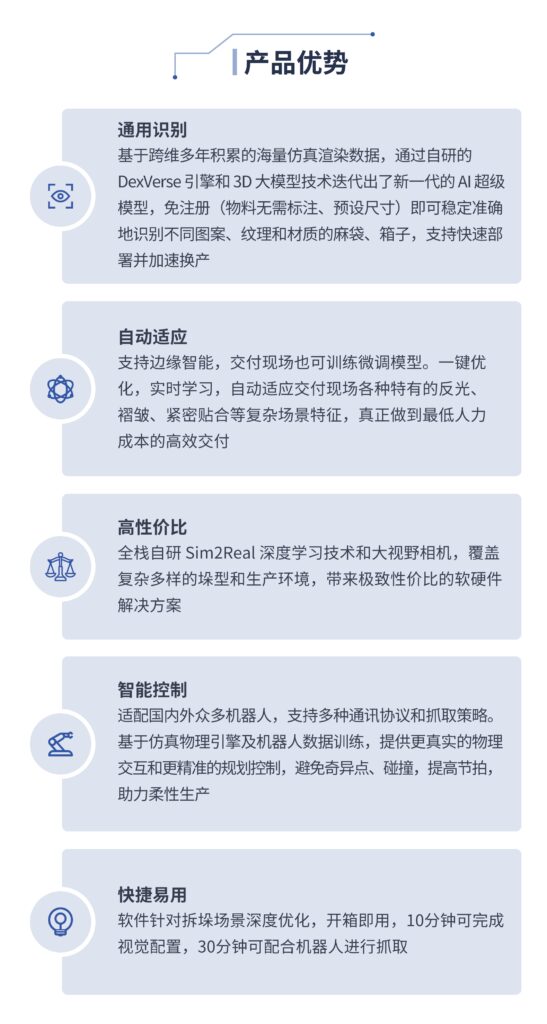
基于跨维智能自研的 DexVerse 引擎和 3D 大模型技术迭代出的新一代Al 超级模型,免注册即可稳定准确地识别不同尺寸、纹理和材质的箱子,快速部署并加速换产
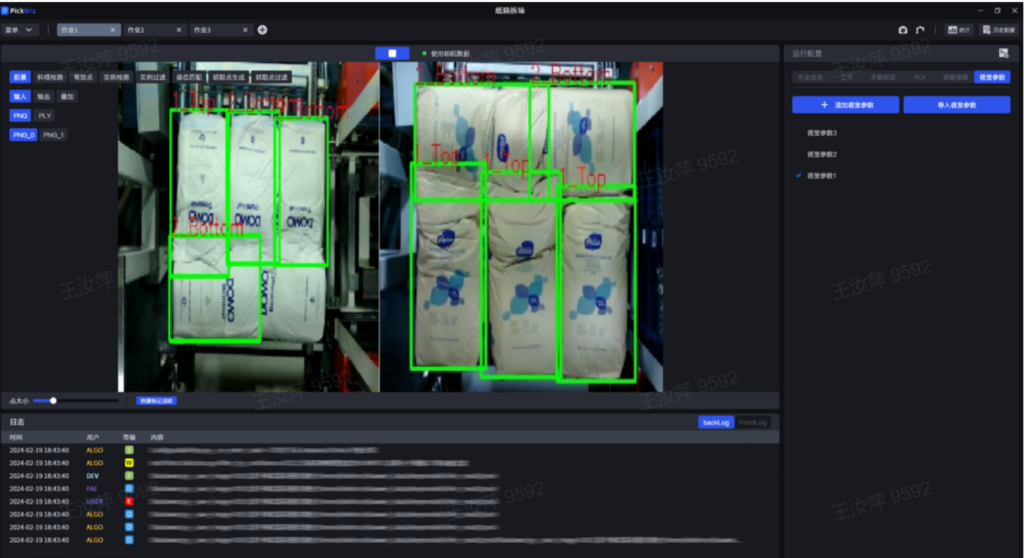
跨维智能 PickWiz 抓取软件针对拆垛场景深度优化,可实现开箱即用,10分钟可完成视觉配置,30分钟可配合机器人进行抓取
支持边缘智能,交付现场也可训练微调模型。一键优化,实时学习,自动适应现场褶皱、箱体紧密贴合的场景,真正做到低成本高效交付
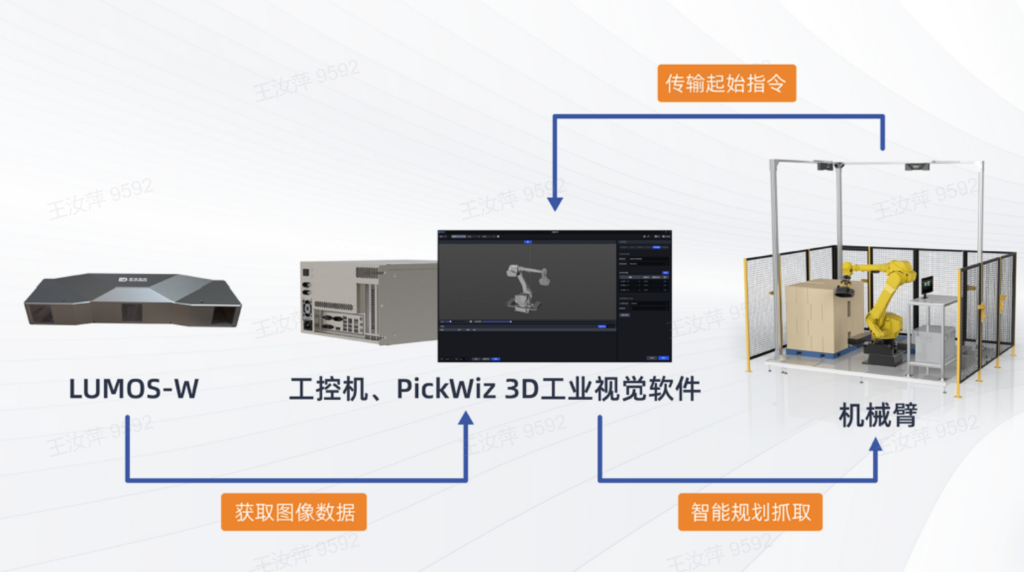
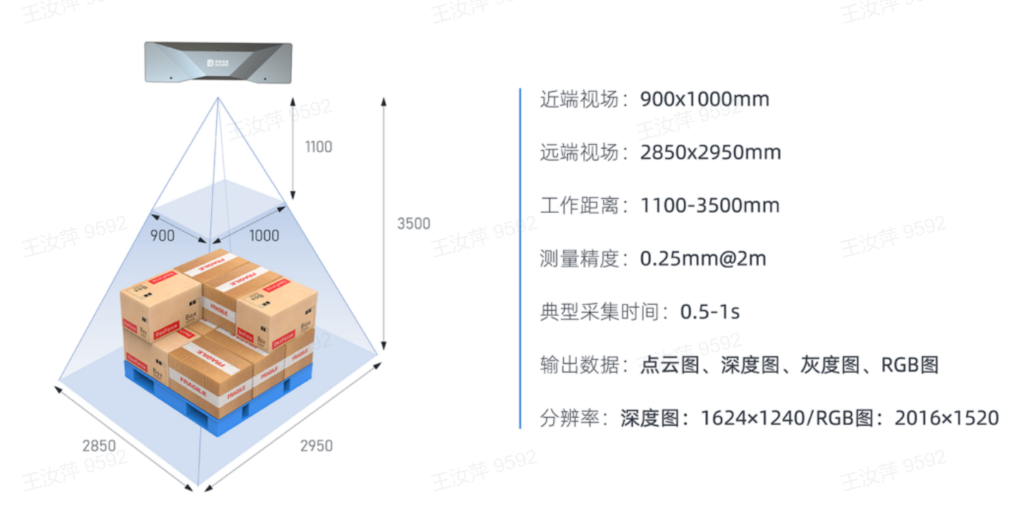
项目效果:该项目采用跨维智能 LUMOS-W 相机+跨维智能 PickWiz 抓取软件+ 机械臂,实现自动化拆垛,生产效率提高70%,人工成本从8人降低至1人。